6161 エスティック 第1期株の学校修了生レポート
第1期株の学校の修了生が作成したレポートをご紹介
この方の事前調査を基に取材を敢行
綿密な事前調査のおかげで、非常に有意義な取材ができました。
特許からもその特徴が読み取れる。
利益率の高さ、成長力、今後の成長シナリオ、注目企業です。
会社沿革

事業内容

‐自動車、自動車部品メーカーを中心に組み立て工程におけるネジの締め付けに使用されている。
‐いかなる振動が加わっても緩まない精度の高い締め付けができる。
最良の締め付けポイントまで締め付けると同時にボルトの亀裂やねじの傷等、人間ではわからない品質管理機能を持っている。
経営陣の経歴
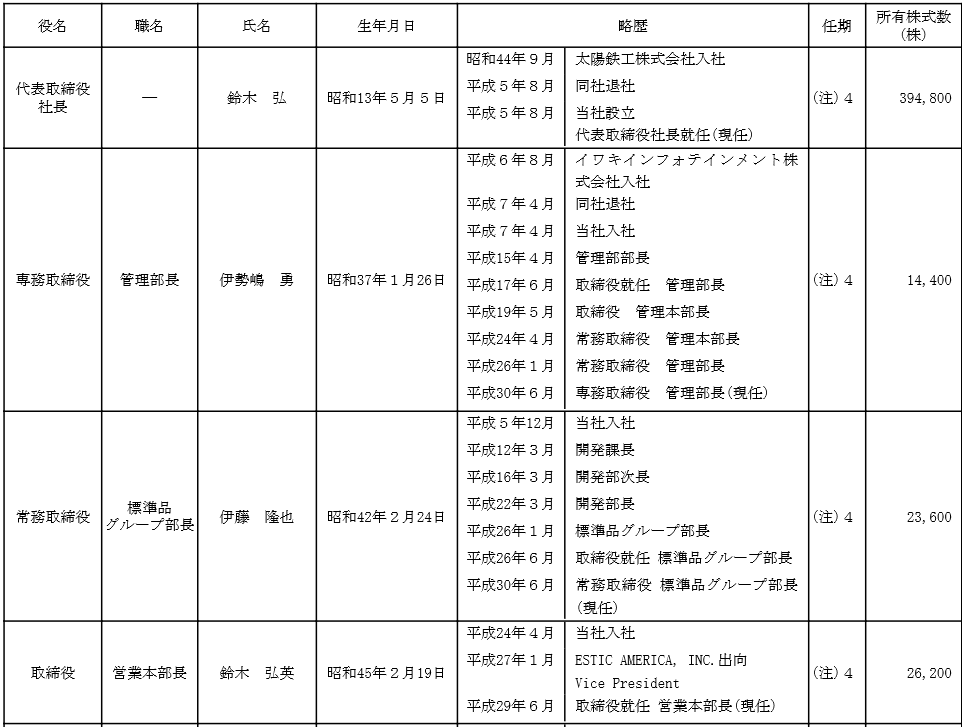
鈴木弘氏が創業社長、
営業本部長の鈴木弘英氏は鈴木弘氏の子息
事業環境
市場規模(グローバル)
- ナットランナ 約600億、ハンドナットランナ 約900億ー1,000億
- エア:電動の割合=8:2 エスティックは電動のみ製造販売
- 工場でのCO2削減、締め付け精度の向上、トレーサビリティーの要請からエアツールから電動に需要がシフトしてきている。
- エスティックの市場シェア
- ナットランナ: 国内は3社で分け合う、30-40%
- ハンドナットランナ: 国内トップで50%強
競合
- アトラスコプコ、ボッシュが全世界で40%ずつのシェア
- 国内:第一電通、技研工業、マキタ
- 過去25年新規参入がない、顧客からの値引き要請はないことが高利益率を支えている
取引会社
- 主に国内外自動車会社、自動車取引会社、 その他 航空機、プラントメーカーと実績あり
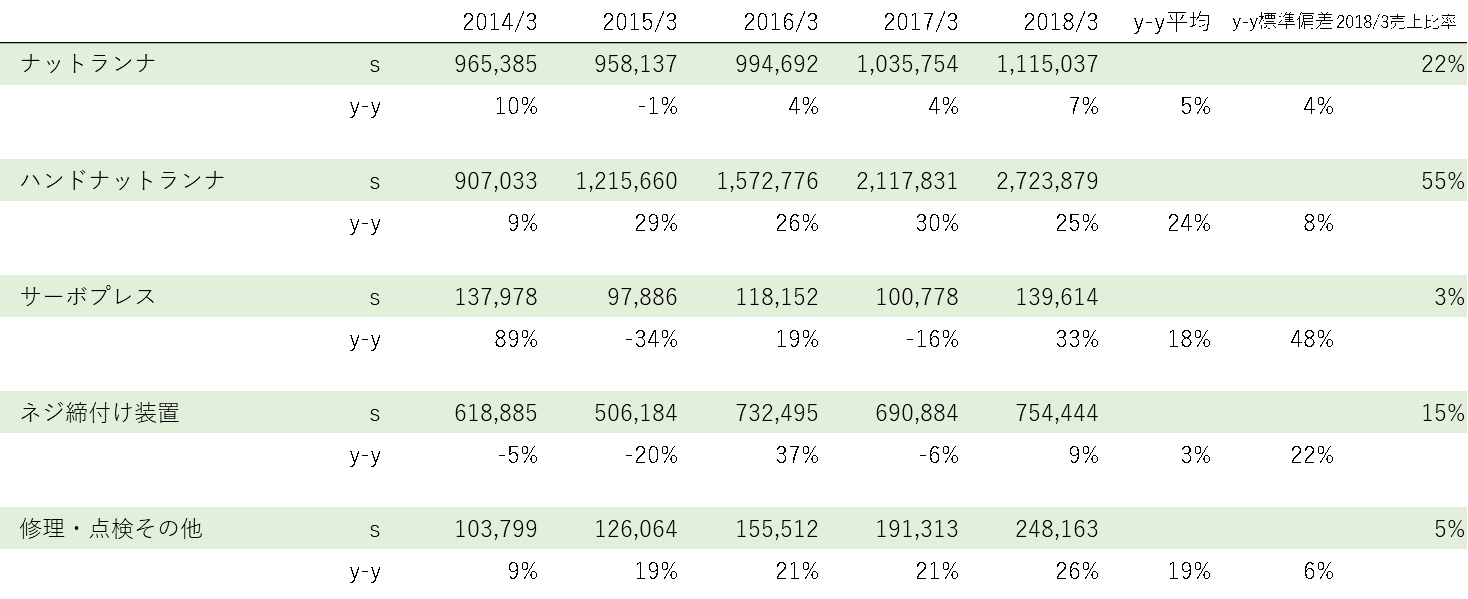
過去業績

過去業績のチェック
- リーマンショック時には減収減益を経験するも2010年3月期を底に増収、1期を除き増益
- 過去3年の増収率、増益率が大きく伸びている。過去12年のOPM平均は18%、直近3年は22%に増加
製品の強みと特徴
- ハンドナットランナに関する強み
- 特許(パルス制御)にて以下を全て実現、かつ対抗する製品が出てこない。
- 締め付け精度が高い
- トレーサビリティ機能(どこを締めた 振動でボルトが緩まないことを保証する)
- 締めたことを検査する工程が削減できる
- 不良検知(ゴミの挟み込み、斜めに入ってしまったりすると、圧力センサーで感知できる)
- 低反力
- アトラスコプコ(アタッチメントを付けるが、手間がかかる)
- 国内他社(クラッチをつけるが精度が落ちてしまう)
- 注意点:建設機械等、締付けに大トルクを要するときには反力低減に限界がある。
- 特許(パルス制御)にて以下を全て実現、かつ対抗する製品が出てこない。
ハンドナットランナとエアとの違い

緩まないボルト締めのために
自動車メーカーで、エンジンや変速機内部の『絶対緩んではいけない』ボルト類は、敢えて塑性域まで引っ張って締め付けるという設計法をしている。これはさらに高度な設計で、ボルトを塑性域まで引っ張り、隙間を生じさせない設計となっている
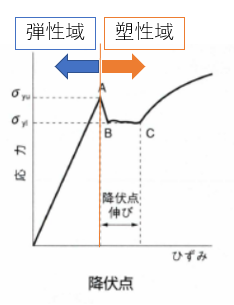
上図:応力ーひずみ試験でAまでは弾性変形でひっぱっても元にもどる。 一方、Aから先は塑性変形になり引っ張った分伸びる。
エアツールの場合、締付けを圧力でしか制御できないので、Aを超す力をかけると必要以上に伸びてしまうため精度が出ない(想像)
一方、電動(サーボモーター)を使った場合、トルクに加えてひずむ距離をコントロールできるので精度が出る。 この時、同速度で一挙に締めようとするとAを乗り越えるまでに強い反力がかかってしまう。 反力を逃がすためにクラッチを使うと、締め付け精度が落ちるし、またストッパーを使うと、締付けの工程に手間がかかる。
エスティックは反力を低減させるため、間欠送りで力を加えて徐々に締めトルクを強くしていき、かつ弾性域から塑性域に移動する最適地点(角度)まで締めることができる。
サーボモータの構造
- エンコーダーを使って回転数と回転位置を見ることが出来るのが大きな特徴かつ、電動ナットランナに不可欠の機構

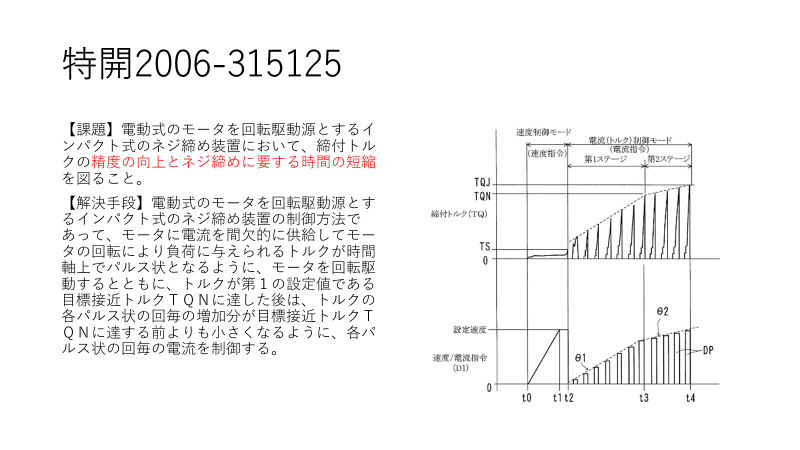
エスティックのパルス締め付け(特許)
- 電動ハンドツールによる締め付け時の反力を抑える独自の技術。
- 1/2000秒毎にトルクデータを取り込み、次の締め付け力(電流値)を制御。
- 反力受けがなくても安全で高精度の締め付けを可能にする。
- 特許の多くは、左図のようなパルス締め付けに関するもの(制御方法や、遊星歯車の形状)
ちなみに締め付けの仕組みは次の動画のように”ドッカンドッカン”叩いて締め付けている
一方的にたたくだけで締め付けると精度が出ない
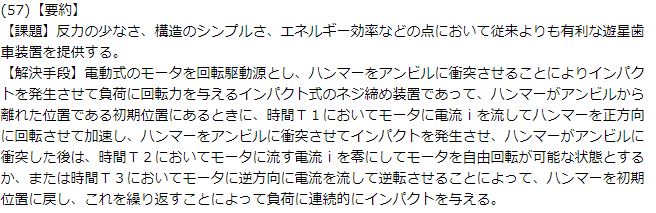
もう一つの特許(詳細な記述部分はレポートの一番最後に記述)
特開2008-55580 発明の名称:インパクト式のネジ締め装置
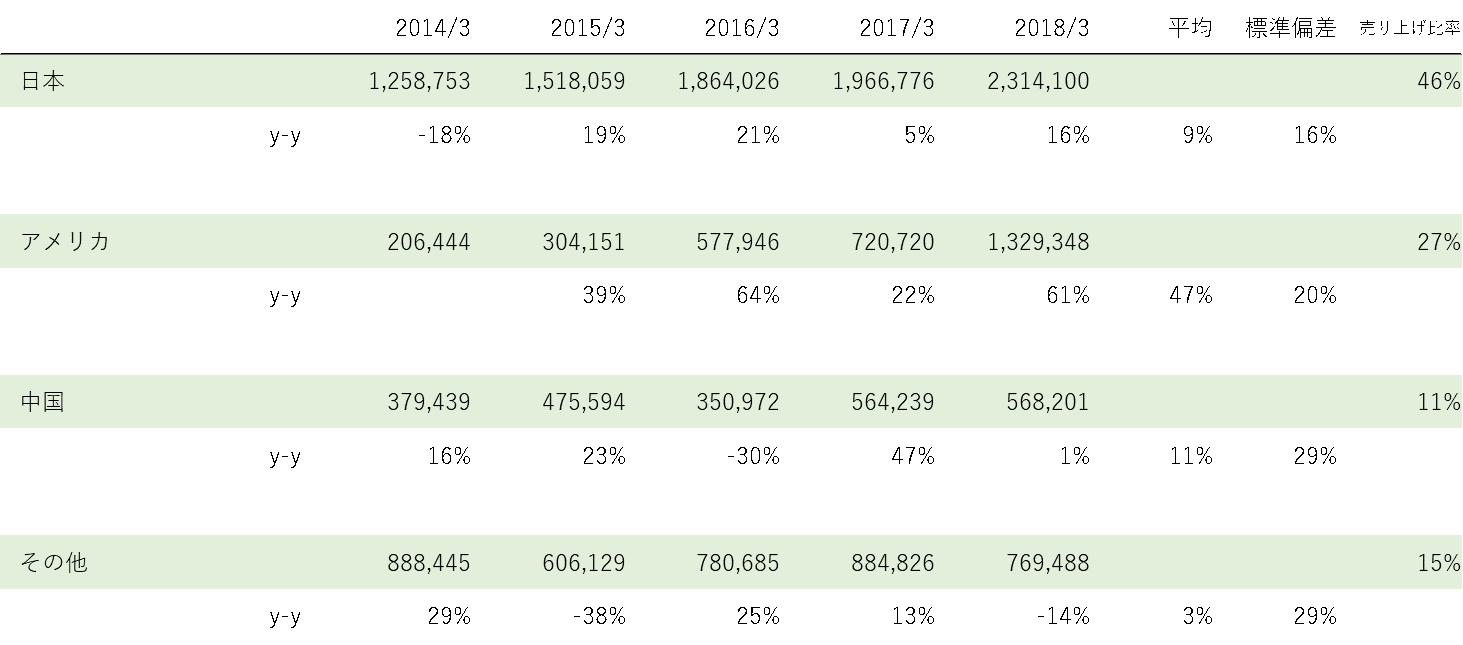
セグメント分析 地域別分析
- ナットランナは国内トップ級のシェア(30%-40%)、ハンドナットランナはシェアトップで50%以上
- 自動車業界が主な顧客となっており、海外では100%自動車業界への売り上げ
- ハンドナットランナはトレーサビリティ、締め付けトルク精度、低反力で製品優位性を持っている。 エアレス化の流れで、需要とシェアの両方を拡大
- ハンドナットランナの需要は半分以上が新規
- 1台100万円として、2700台売ったことになる。
地域別
今後の成長予想
- ハンドナットランナ全体:製品の優位性を背景に、緩まないネジかつトレーサビリティへのニーズ、および低CO2化のニーズがあること。 市場が十分大きいこともあり、5年以上の成長が自動車業界を中心に期待できる。
- 国内:製品の優位性、エアレス化の流れが続き需要増が続き、人員の増員に比例した増加を想定
- 米国:年内にはデトロイトに2拠点目として進出。 時期未定であるものの3拠点目を南部に進出予定。 アトラスコプコが200億円を売り上げていることから、製品優位性を元に日系メーカー中心に人員、拠点増員に伴った売上成長が期待できる。 一方で、増員がどれだけ確保し戦力となるかが成長の度合いを左右するとみる。
アップサイド:
- 日系以外、特にアメリカ系の自動車会社との取引の拡大度合いで、日本以上の大きな売上がアメリカで期待できる
- 自動車業界以外(航空機、鉄道、ロボット、ドローン)への展開が広がる
- 営業の人員増員、戦力化が進む
- 有償サービスが進む(現時点では、優先順位は低い模様)ことによる利益率改善
ダウンサイド:
- 景気減速による、自動車産業での設備投資額減少
- 営業の人員確保、成長が進まない、或いは日系以外の会社のニーズを汲み取れないため思ったほどアメリカでのシェアが取れない
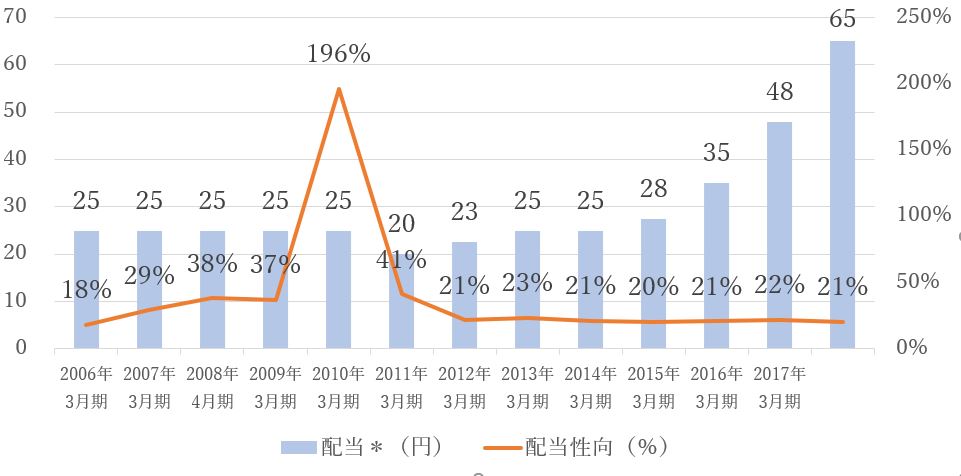
配当
*補足 特許から読み取れる特徴 (特許の文章そのまま)
一部を抜粋
特徴がわかりやすく書かれているのでぜひ読んでいただきたい
公開番号:特開2008-55580(P2008-55580A)
ところで、従来のインパクト式のネジ締め装置には次のような問題がある。
(1) シャフトを回転ハンマーで打撃する機構のものは、非常に大きな音を連続的に発生するので、長時間の作業では耳栓の着用が必要となるなど、騒音問題がある。
(2) シャフトを回転ハンマーで打撃する機構のものは、打撃ごとに出力トルクが変動し、トルク精度が非常に悪い。また、衝撃を受けるハンマーおよび出力シャフトの磨耗が激しいため、寿命が短く、こまめなメンテナンスが必要である。
(3) オイルパルス機構のものは、その構造上、油の圧縮非圧縮を繰り返すため、衝撃発生機構そのものが発熱するので、エアモータの排気などで冷却を行わないと熱くて使用できない問題がある。また、油温によって発生トルクが変化するため、使用開始から使用終了までトルクを安定的に発生できない問題がある。また、ブレード、パッキン、および油は、高温、高圧にさらされるので、それらの劣化が激しく、そのため寿命が短く、こまめなメンテナンスが必要である。
(4) また、特許文献1、2のネジ締め装置についても、モ-タの制御や衝撃発生機構を改良してさらにエネルギー効率を高めるなど改良の余地がある。
【0009】
本発明は、上述の問題に鑑みてなされたもので、反力の少なさ、構造のシンプルさ、エネルギー効率などの点において従来よりも有利なインパクト式のネジ締め装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るネジ締め装置は、電動式のモータを回転駆動源とし、ハンマーをアンビルに衝突させることによりインパクトを発生させて負荷に回転力を与えるインパクト式のネジ締め装置であって、前記ハンマーが前記アンビルから離れた位置である初期位置にあるときに、前記モータに電流を流してハンマーを正方向に回転させて加速し、前記ハンマーを前記アンビルに衝突させてインパクトを発生させ、前記ハンマーがアンビルに衝突した後は、前記モータに流す電流を零にして前記モータを自由回転が可能な状態とするか、または前記モータに逆方向に電流を流して前記モータを逆転させることによって、前記ハンマーを前記アンビルとの衝突位置から前記初期位置に戻し、これを繰り返すことによって前記負荷に連続的にインパクトを与えるように構成される。
【0011】
好ましくは、前記ハンマーがアンビルに衝突した後において、前記モータに流す電流を零にして前記モータを自由回転が可能な状態とし、前記ハンマーのアンビルへの衝突による跳ね返りによって前記ハンマーを前記初期位置に戻す。
【0012】
また、前記ハンマーがアンビルに衝突した後において、前記モータに逆方向に電流を流して前記モータを逆転させることによって前記ハンマーを前記初期位置に戻す。
【0013】
また、前記ハンマーがアンビルに衝突した後において、前記モータに流す電流を一旦零にし、その後に逆方向に電流を流して前記モータを強制的に逆転させ、これによって前記ハンマーを前記初期位置に戻す。
【0014】
また、前記ハンマーがアンビルに衝突したことが検出されてから予め設定された第1の時間が経過したときに、前記ハンマーが前記初期位置に戻ったとして前記モータに電流を流してハンマーを正方向に回転させる。
【0015】
また、前記ハンマーがアンビルに衝突したことが検出されてから予め設定された第1の時間が経過するまでの間において、予め設定された第2の時間だけ前記モータに逆方向に電流を流す。
【0016】
また、前記負荷に与える回転トルクを検出するトルクセンサを設けておき、
前記トルクセンサの検出信号が予め設定された設定トルクに達したときに、前記ハンマーがアンビルに衝突したことを検出する。